Im Setup bewegt es sich so, wie gewollt. Dshoot regel ich gleich mal runter. Bild direktionales aktivier ich auch.
Reihenfolge habe ich über Betaflight schon getesten, das passt. Bei der Drehrichtung bin ich mir auch sicher.
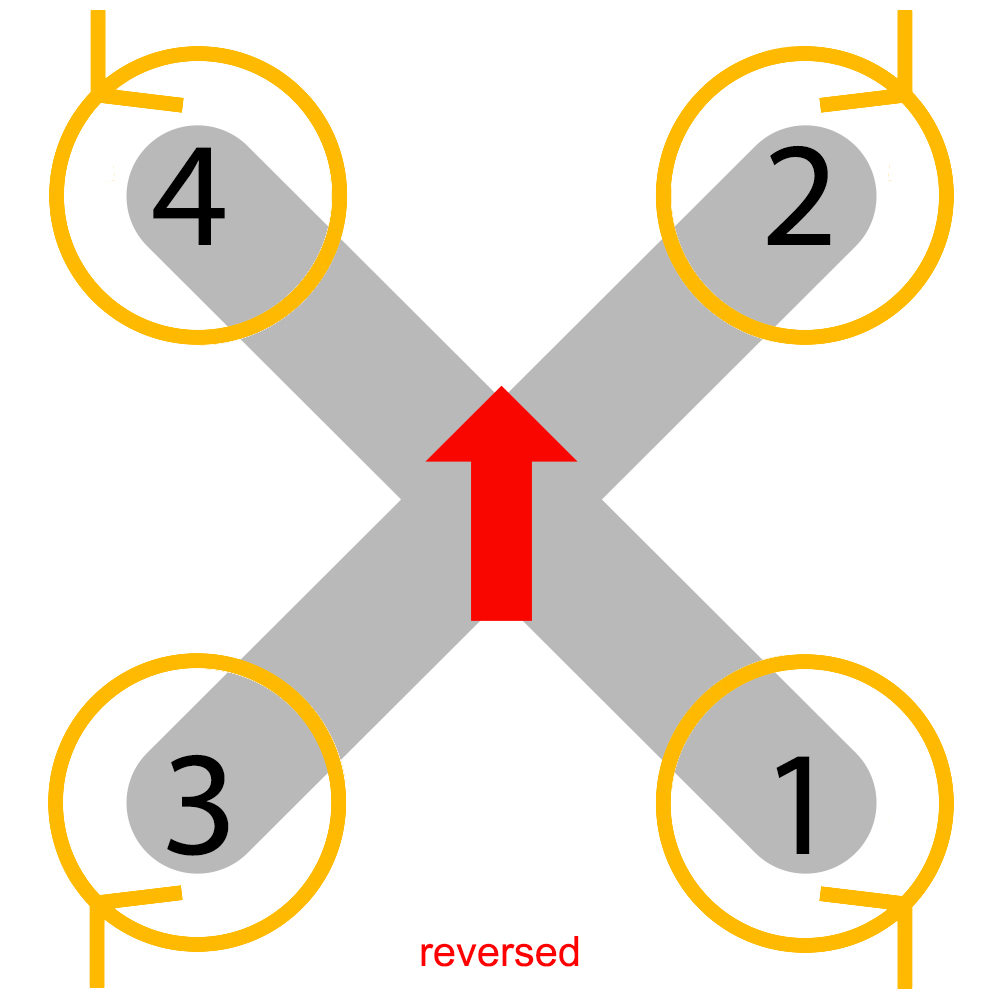
Poste gleich mal eine kleine ˋˋZeichnung´´, folgt in 5min.
Reihenfolge habe ich über Betaflight schon getesten, das passt. Bei der Drehrichtung bin ich mir auch sicher.
Poste gleich mal eine kleine ˋˋZeichnung´´, folgt in 5min.
Love it,
………change it,
………………or leave it
………change it,
………………or leave it






 .
. Muss wohl doch noch gaaanz viel lernen
Muss wohl doch noch gaaanz viel lernen 